Кинематическая пара – это связь между двумя телами, которая имеет движительное и стационарное звенья. Классификация кинематических пар является важным инструментом в механике для анализа движения механизмов и машин. Она позволяет различать различные типы пар, исследовать их особенности и применять их в различных областях техники.
Виды кинематических пар можно разделить на пять основных категорий: поворотные, поступательные, винтовые, качательные и скольжения. Поворотные пары представляют собой соединение двух деталей, которое позволяет одной из них поворачиваться относительно другой вокруг оси. Поступательные пары позволяют одной детали перемещаться вдоль прямой линии относительно другой. Винтовые пары сочетают в себе движение вращения и поступательное движение. Качательные пары включают в себя движение с одновременным поворотом и поступательным движением одного звена относительно другого. Скольжения позволяют движущемуся звену при прохождении через деформирующее воздействие осуществлять поступательное движение вдоль определенной траектории.
Каждый тип кинематической пары имеет свои особенности и применяется в различных механизмах и машинах. Например, поворотные пары встречаются в шариковых подшипниках, шарнирах и сочленениях. Поступательные пары широко применяются в системах передачи и двигателях внутреннего сгорания. Винтовые пары используются в резьбовых приводах и шпинделях. Качательные пары встречаются в механизмах сферического зубчатого колеса и гидромоментах. Скольжения применяются в плоскостных и валовых планшетных механизмах.
- Виды кинематических пар в машиностроении: классификация и особенности
- Основные виды кинематических пар
- Вращающаяся и вращающаяся пара
- Шарнирная и поворотная пары
- Скольжение и скольжение пары
- Особенности кинематических пар
- Идеальная и реальная пары
- Строение и функции механизма
- Закон движения и допуски
- Типичные варианты кинематических пар
- Вертикальная и горизонтальная пары
- 📸 Видео
Видео:Кинематические парыСкачать

Виды кинематических пар в машиностроении: классификация и особенности
Основные виды кинематических пар:
| Название | Описание | Примеры |
|---|---|---|
| Шарнирная | Соединяет две детали вокруг оси, позволяя вращаться | Шарнирная соединение рычага с осью кривошипа |
| Плоская | Позволяет движение деталей только в плоскости | Соединение шарнирного звена с плоской деталью |
| Цилиндрическая | Один элемент имеет цилиндрическую форму, второй элемент подходит к нему посадочным отверстием | Соединение вала и подшипника |
| Винтовая | Один элемент имеет резьбовую форму, второй элемент подходит к нему резьбовым отверстием | Соединение винта и гайки |
| Зубчатая | Взаимодействие зубьев одного элемента с зубьями другого элемента | Соединение двух зубчатых колес |
Каждый вид кинематической пары имеет свои особенности и применяется в конструкциях машин и механизмов в зависимости от требуемых движений и нагрузок. Выбор правильного типа кинематической пары является важной задачей в машиностроении, так как от выбора может зависеть эффективность работы механизма или детали.
Видео:ПРАКТИКА # 4 . ТММ. Классы кинематических пар.Скачать

Основные виды кинематических пар
Кинематическая пара представляет собой соединение двух тел, обеспечивающее их относительное движение. Существует множество различных видов кинематических пар, каждая из которых имеет свои особенности и применение.
Основные виды кинематических пар включают:
- Шарнирную пару. Это наиболее распространенный тип пары, который обеспечивает вращательное движение вокруг одной оси. Примером шарнирной пары является соединение крышки и тела бутылки.
- Плоскостную пару. Данная пара позволяет движение тел в плоскости относительно друг друга. Примером плоскостной пары является соединение двери и петли.
- Винтовую пару. Эта пара позволяет совмещать движение вращения и поступательного движения. Примером винтовой пары является соединение ручки и винта.
- Цилиндрическую пару. Данный тип пары позволяет относительное движение вокруг оси и поступательное движение вдоль этой оси. Примером цилиндрической пары является соединение салазок и крышки термоса.
- Коническую пару. Эта пара обеспечивает вращательное движение вокруг осевой линии и поступательное движение вдоль этой линии. Примером конической пары является соединение зубчатой передачи.
- Параллельную пару. Данный тип пары позволяет движение тел вдоль параллельных линий. Примером параллельной пары является соединение направляющих стержней.
Каждый из этих видов кинематических пар имеет свои особенности и применяется в различных механизмах, включая машины, транспортные средства и промышленное оборудование.
Вращающаяся и вращающаяся пара
Вращающаяся пара обеспечивает вращение вокруг оси. Она состоит из замкнутой контактной области, где находятся ось вращения и сопрягаемые поверхности. Контактные поверхности могут быть шариковыми, цилиндрическими или коническими. Вращающаяся пара позволяет передавать усилия и моменты от одной детали к другой при вращении.
Кроме того, вращающаяся пара может быть обеспечена различными элементами крепления, такими как подшипники или втулки. Они обеспечивают не только вращение, но и снижение трения, а также повышение точности и надежности работы механизма.
Вращающаяся пара имеет широкое применение в различных механизмах и машинах. Она используется во всех типах двигателей, роторно-поршневых машинах, ленточных и цепных передачах, редукторах и других устройствах, где требуется передача вращательного движения.
Особенностью данной пары является возможность передачи больших моментов и сил. Она также отличается высокой точностью и долговечностью, особенно при использовании специальных подшипников и смазочных материалов.
| Преимущества вращающейся пары | Недостатки вращающейся пары |
|---|---|
| Высокая надежность | Требуется точность совмещения осей и поверхностей |
| Большие моменты и силы | Возможность износа и трения |
| Широкое применение | Высокая стоимость некоторых деталей |
Вращающаяся и вращающаяся пара являются основными элементами многих механизмов. Они обеспечивают передачу вращательного движения и позволяют управлять созданием и передачей моментов и сил. Правильный выбор и применение вращающейся пары в конкретных условиях позволяет достичь высокой эффективности работы механизмов и машин.
Шарнирная и поворотная пары
Поворотная пара — это кинематическая пара, у которой ось вращения сонаправлена с направлением силы (усилию) иначе называемый направлением силы. Поворотная пара обеспечивает вращательное движение вокруг оси. Частные случаи поворотной пары — шарнирная и цилиндрическая пары.
Скольжение и скольжение пары
Скольжение пары может быть разных видов:
- Линейное скольжение — перемещение происходит вдоль прямой линии.
- Плоскостное скольжение — перемещение происходит вдоль плоскости.
- Винтовое скольжение — перемещение происходит вдоль спирали или винта.
Существуют два основных типа скольжения пары:
- Полное скольжение пары — соприкасающиеся поверхности движутся друг относительно друга без вращения.
- Частичное скольжение пары — соприкасающиеся поверхности движутся друг относительно друга совместно с вращением.
Скольжение пары играет важную роль в механике и машиностроении. Оно влияет на трение, износ и геометриическую точность между соединенными деталями. Понимание видов и особенностей скольжения пары позволяет проектировать и создавать более эффективные и долговечные механизмы и машины.
Видео:ПРАКТИКА #4.1. ТММ. КЛАССЫ КИНЕМАТИЧЕСКИХ ПАР.Скачать

Особенности кинематических пар
Одна из особенностей кинематических пар — это тип соединения. Кинематическая пара может быть цилиндрической, шарнирной, плоской, винтовой и других типов, каждый из которых имеет свои особенности и применение.
Другая особенность кинематических пар — это число степеней свободы. Степень свободы — это количество независимых координат, которыми можно описать положение тела относительно другого. Кинематические пары могут иметь различное число степеней свободы, что определяет их гибкость и возможности перемещения.
Еще одна особенность кинематических пар — это виды движения, которые они обеспечивают. Некоторые пары позволяют только вращение, другие — только поступательное движение, а некоторые — комбинацию обоих видов движения.
Другие важные особенности кинематических пар — это четкость, точность и надежность соединения. В зависимости от конструкции и качества изготовления кинематических пар, они могут быть более или менее четкими в своих движениях, обеспечивать более или менее точное положение тел, а также быть более или менее надежными в работе.
Все эти особенности кинематических пар имеют важное значение при проектировании и использовании механизмов. Они позволяют подобрать оптимальные соединения для решения конкретных задач, обеспечивают нужные возможности перемещения и обеспечивают надежность и работоспособность механизмов.
Идеальная и реальная пары
В механике выделяют два типа кинематических пар: идеальные и реальные. Идеальные пары существуют в теоретических моделях и предполагаются лишенными трения и любых других видимых несовершенств. Реальные пары, напротив, учитывают реальные условия эксплуатации и могут включать трение, износ, люфты и прочие особенности.
Идеальные пары используются для анализа простых кинематических механизмов и позволяют получить точные решения уравнений и законов движения. Однако, в реальной жизни всегда присутствует трение и другие неравномерности, что делает идеальные пары не применимыми.
Реальные пары являются более практическими, так как они учитывают все факторы, которые могут повлиять на работу кинематической системы. Например, трение возникает при соприкосновении двух поверхностей и может снижать эффективность работы пары. Люфты между элементами механизма могут привести к нестабильности движения и повышенному износу деталей.
При проектировании и эксплуатации механизмов необходимо учитывать реальные особенности пар, чтобы обеспечить их надежную работу и долговечность. Анализ идеальных пар позволяет получить общие законы движения, которые могут быть применены в реальных условиях, но требует учета всех неравномерностей и особенностей реальных пар.
Строение и функции механизма
Основные функции механизма включают передачу, преобразование и управление движения. С помощью механизмов можно преобразовывать различные виды движения, например, вращательное или поступательное, а также передавать и усиливать силу.
Строение механизма определяется его составными элементами и их взаимодействием. Основными элементами механизма являются кинематические пары, которые обеспечивают возможность относительного движения между деталями.
В зависимости от типа кинематической пары, механизмы могут быть классифицированы на различные виды. Например, для вращательных пар используются валы и подшипники, а для поступательных пар — шарниры и шатуны.
Каждая деталь в механизме выполняет свою функцию. Одни детали передают движение, другие усиливают его, третьи выполняют преобразование движения. Все детали механизма синхронно работают вместе, обеспечивая плавное и надежное функционирование механизма в целом.
Закон движения и допуски
Закон движения и допуски играют важную роль в классификации кинематических пар. Закон движения определяет ограничения, которые накладываются на движение элементов в кинематической паре.
Допуски, или допустимые отклонения, представляют собой диапазоны значений параметров, в пределах которых элементы пары могут свободно двигаться друг относительно друга без возникновения нежелательных последствий, таких как трение или износ. Допуски могут быть определены для различных параметров, таких как размеры, формы, расположение и поверхностное состояние элементов пары.
Важно отметить, что допуски являются необходимыми для обеспечения правильной работы кинематической пары, так как слишком строгие ограничения могут привести к невозможности движения или затруднить его, а слишком свободные — вызвать неустойчивость или износ элементов.
Для описания допусков часто используется таблица, в которой указываются требуемые размеры или отклонения от заданных значений для каждого параметра. Такая таблица может быть представлена в виде HTML-таблицы, где в строках указываются параметры, а в столбцах — требуемые значения или диапазоны для каждого параметра.
| Параметр | Допустимое отклонение |
|---|---|
| Длина | ±0.1 мм |
| Ширина | ±0.05 мм |
| Высота | ±0.2 мм |
| Угол | ±1 градус |
В приведенном примере показана таблица с допусками для некоторых параметров элементов кинематической пары. Допуски указываются с учетом требуемой точности и функциональности пары.
Таким образом, закон движения и допуски являются важными аспектами классификации кинематических пар. Закон движения определяет ограничения на движение элементов, а допуски определяют диапазоны допустимых отклонений от заданных значений параметров.
Видео:ТММ - 3.4. 1 часть. Звенья и кинематические пары, входящие в состав механизма.Скачать
Типичные варианты кинематических пар
В механизмах можно выделить несколько типичных вариантов кинематических пар, которые обеспечивают определенные виды движений. Каждый тип кинематической пары имеет свои особенности и может использоваться в различных механизмах для достижения нужных целей.
1. Шарнирная пара: обеспечивает вращение между двумя звеньями вокруг одной оси. Шарнирная пара часто используется в различных механизмах, таких как двери, ручки, рычаги и многие другие.
2. Цилиндрическая пара: обеспечивает вращение и поступательное движение между двумя звеньями. Этот тип кинематической пары находит применение в таких устройствах, как винтовые шпиндели, вращающиеся штанги и т.д.
3. Плоская пара: обеспечивает движение плоских звеньев одно относительно другого. Плоская пара применяется в различных механизмах, включая сочленения артикулированных роботов, трехосные сваи и многие другие.
4. Винтовая пара: обеспечивает перемещение одного звена вдоль винта. Винтовая пара широко используется в таких устройствах, как винтовые домкраты, гайки и винты, шпиндели и многое другое.
5. Сферическая пара: обеспечивает вращение и поступательное движение одного звена относительно другого в любой точке. Сферическая пара находит применение в таких устройствах, как шаровые суставы, шарниры велосипедов и т.д.
Каждый тип кинематической пары имеет свои особенности и может быть использован для реализации различных видов движений в механизмах. При проектировании механизмов важно учитывать эти особенности и выбирать подходящие типы кинематических пар для достижения нужных целей.
Вертикальная и горизонтальная пары
Вертикальные пары позволяют передавать движение от одного элемента механизма к другому в вертикальном направлении. Примерами вертикальных пар могут быть шариковая опора, гнездовой шариковый подшипник, опорная шайба и т. д. Эти пары обеспечивают гладкое и плавное движение между элементами и устойчивую передачу нагрузки.
Горизонтальные пары, в свою очередь, передают движение в горизонтальном направлении. Они также используются для передачи силы и движения в механизмах. Примеры горизонтальных пар включают плоскомашиностроительные и сочлененчатые соединения, шарнирные соединения и т. д. Горизонтальные пары обеспечивают гибкость и свободу движения между элементами механизма.
Изучение вертикальных и горизонтальных пар позволяет понять особенности и принципы работы различных механизмов. Кроме того, выбор правильного типа и конструкции пары является ключевым аспектом проектирования механизмов с требуемыми характеристиками.
Вертикальные и горизонтальные пары играют важную роль в современной технике и могут быть найдены во многих устройствах и машинах — от простых механизмов до сложных промышленных систем.
📸 Видео
2 1 Основные виды механизмов Подвижность кинематических цепейСкачать

Классификация кинематических пар.Скачать

Урок 7. Механическое движение. Основные определения кинематики.Скачать

Прикладная механика Клссификация плоских механизмов по Ассур Артоболевскому Профессор АлимухамедоСкачать

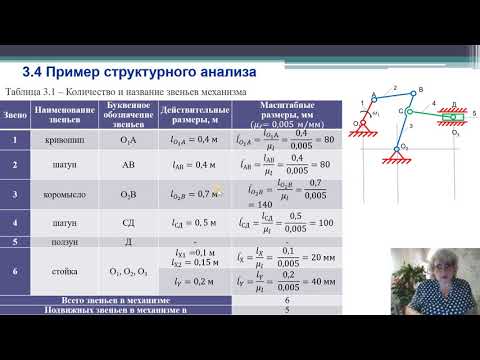
ТММ - 3.4. 2 часть. Пример структурного анализа. Разделение механизма на структурные группы.Скачать

Классификация сил действующих на механизм Виды силового анализа.Скачать

ТММ - 2.3 Классификация механизмов. Механизмы преобразующие вид движения.Скачать

Кынатбекова Н. Н. Тема: "Введение в теорию механизмов и машин".Скачать

ПРАКТИКА #1. ТММ. Структурный анализ кривошипно- ползунного механизма.Скачать

Агроинженерия - Техмех 2022-02-16 Лекция "Кинематические пары и кинематические цепи"Скачать

ТММ - 3 1, 3 2 Начальные механизмы первого класса. Группы Ассура.Скачать

Теория механизмов и машин - (ТММ 1.2). Основные понятия и определения.Скачать

ЛЕКЦИЯ #3. ТММ. Виды рычажных механизмов.Скачать
Лекция «Механические передачи, их назначение, классификация»Скачать

Кинематические характеристики механизма. Параметры и функции необх. для анализа положения звеньевСкачать

Основные понятия Теории механизмов и машинСкачать
